Academic
## Academic
### Local Map Optimization for Visual Inertial Mapping
##### Master Thesis
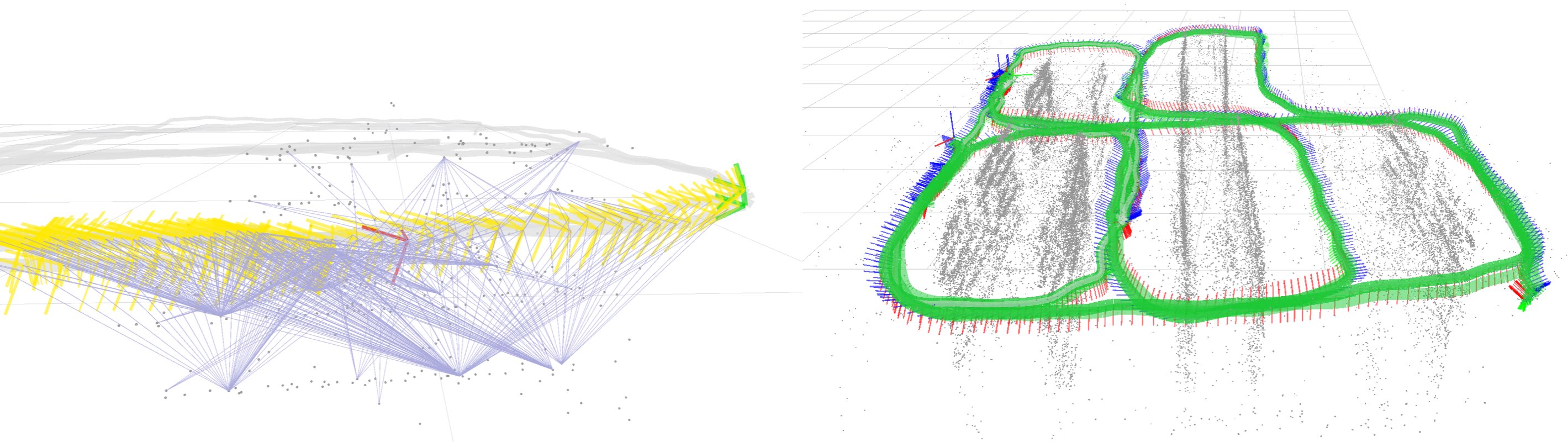
A long term goal for autonomous robot research is to develop an accurate localisation technique based on visual data. To do so in a large environment, a large global map has to be constructed.
Also for other reasons, but mainly when updating the global map with new data, the visual map needs a readjustment optimising the 3D structure to the measurements.
To limit time and computational size, I implemented and analysed a local optimisation method as an alternative to a global optimisation.
The thesis was written at the [Autonomous System Lab](http://www.asl.ethz.ch) of Prof. Roland Siegwart. The research was maintained in collaboration with [Google Project Tango](https://www.google.com/atap/project-tango/).
-
### Kalman-Filter Enhanced Iterative Learning Control
##### Semester Thesis
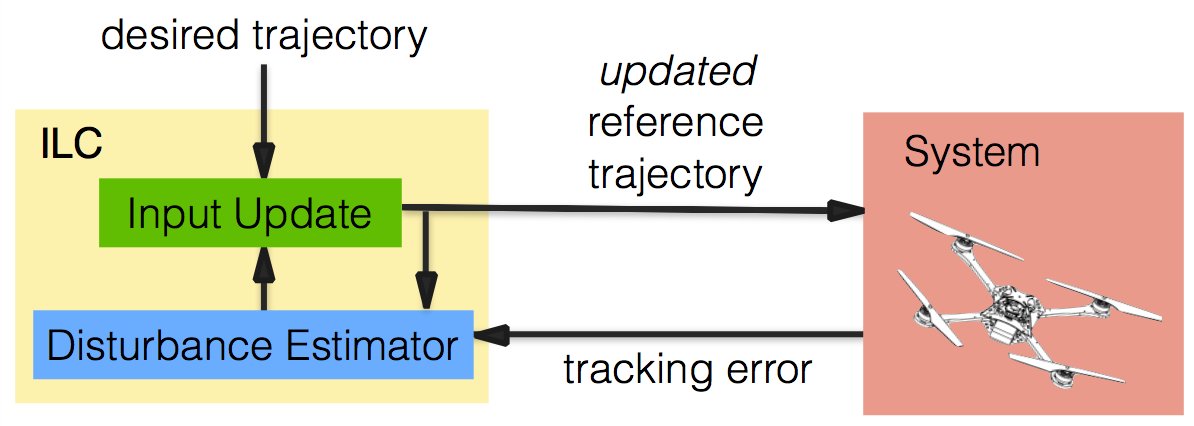
Making use of a repeated control task, the information of the experienced error can be used to improve the controller performance dramatically.
My semester thesis consisted of finding a mathematical formulation that allows a comparison of two approaches and an analysis of the differences.
As part of my master degree at ETH Zürich, I wrote my semester thesis during an exchange semester at the [Dynamic System Lab](http://schoellig.name) of Prof. Angela Schoellig in University of Toronto's Institute for Aerospace Studies.
Publication: [Conference Paper from 2014 IEEE 53rd Annual Conference on Decision and Control (CDC)](http://ieeexplore.ieee.org/xpl/articleDetails.jsp?reload=true&arnumber=7039947) ([slides](http://www.dynsyslab.org/wp-content/papercite-data/slides/degen-cdc14-slides.pdf))
-
### Setup for Schlieren Visualization of Ultrasound waves
##### Bachelor Thesis
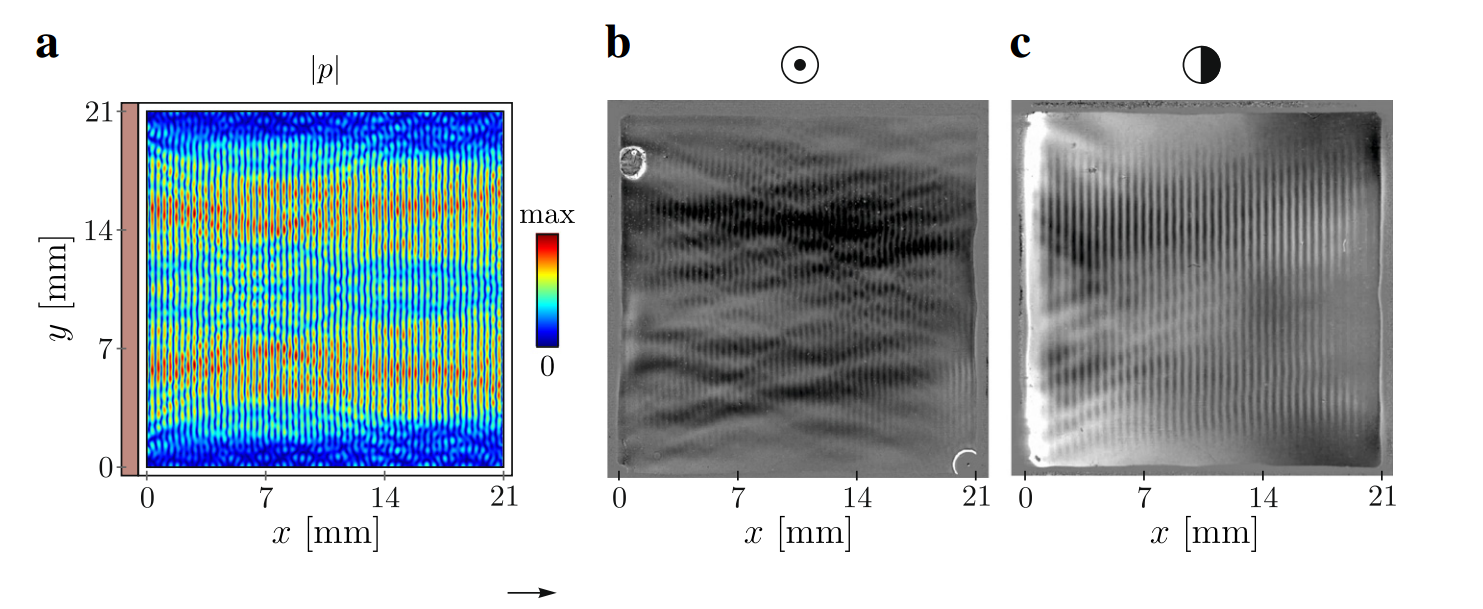
Acoustic manipulations is a research field that tries to apply a force to particles suspended in a water chamber by emitting acoustic waves, presumably ultrasound, and thus creating standing waves with pressure gradients that result in forces onto these particles.
As a bachelor thesis, I developed an optical setup that made use of the Schlieren visualization technique to visualise the standing ultrasonic waves that were produced inside of a water filled 20x20x2mm transparent plastic box with piezo actuators.
The Research was performed in Prof. Jürg Dual's [Mechanics and Experimental Dynamics Group](http://www.zfm.ethz.ch/e/exp-dyn/) at the Institute for Mechanical Systems of ETH Zürich, supervised by Dr. Dirk Möller
Publication: [Article in Journal of Nanobiotechnology 2013, 11:21](http://www.jnanobiotechnology.com/content/11/1/21/)
-
### Studies in Mechanical Engineering, Control Systems and Robotics
##### Master of Science in Mechanical Engineering from ETH Zürich.
My studies were part of the mechanical engineering program but focused largely on robotics, system and control classes.
* Control Theory
* System Modeling
* Analysis and Linear Algebra
* Classical mechanical engineering such as fluid dynamics, thermodynamics, construction structural mechanics etc.
* Spacecraft Dynamics
* Recursive Estimation (Kalman Filters)
* Dynamic Programming and Optimal Control
+
